overview
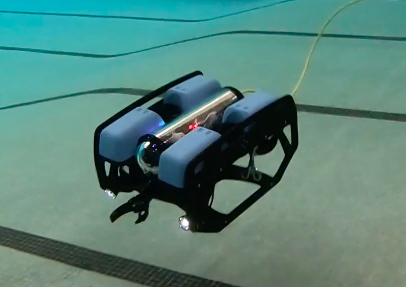
at dartmouth i worked on robot control, navigation, and localization for an underwater vehicle with a manipulator arm. the system had to move in a constrained underwater workspace, find and handle blocks, and support structure assembly tasks.
focus areas
- control and motion for a tethered platform in water
- navigation and localization so the robot could operate repeatably in the tank environment
- integration toward block gathering, placement, and assembly behaviors
publication
Droplet: Towards Autonomous Underwater Assembly of Modular Structures
Robotics: Science and Systems (RSS), 2021