overview
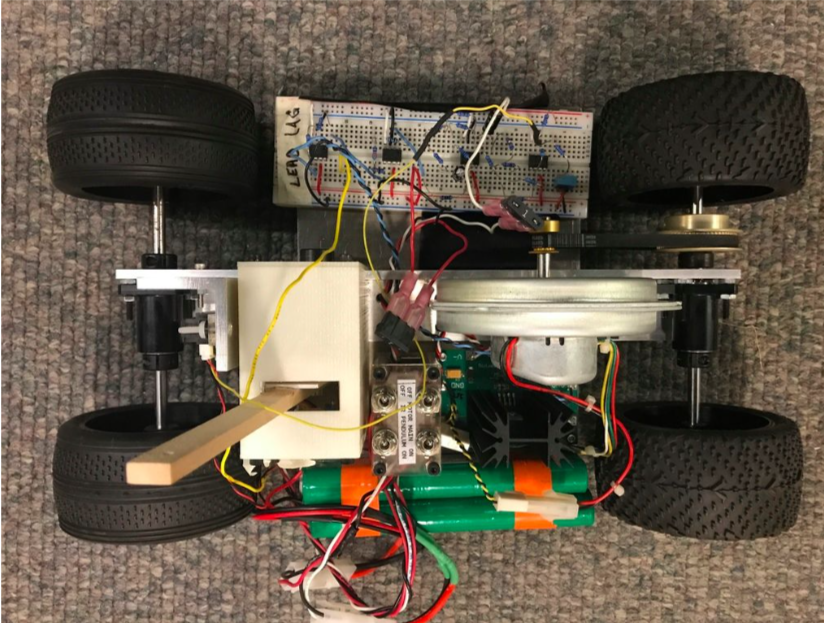
modeled the uncompensated line-following car, designed a compensator to cut oscillation and path error, and implemented it on the real hardware. the result was a tuned lead-lag controller that tracked cleanly without the sideways wobble you get when gains are too eager or phase is wrong.
demo video
report
if the preview doesn’t show, open the pdf here.